




24V~36V Підводний двигун Водонепроникний двигун Тяга двигуна 7kg~9kg
Опис
Підводний безщітковий двигун SW4025 розрахований на напругу 24~36 В постійного струму, спеціально розроблений для підводних дронів/роботів. Ця модель не має пропелера, користувачі можуть створити власний пропелер та закріпити його гвинтами.
Це звичайний безщітковий двигун, ним можна керувати будь-яким звичайним контролером ESC дрона або звичайним контролером безщіткового двигуна.
Гарна форма, тривалий термін служби, технологія низького рівня шуму, високий рівень енергозбереження, високий крутний момент та висока точність.
Він широко використовується в прецизійному електронному обладнанні, обладнанні автоматизації, водному та підводному обладнанні, модельних авіаційних безпілотниках та інтелектуальних роботах.
Перш ніж розмістити замовлення, переконайтеся, що у вас є можливість спроектувати пропелер.
Параметри
| Тип двигуна | Підводний безщітковий двигун |
| Вага | 310 г |
| Підводний тяга | 7 кг ~ 9 кг |
| Номінальна напруга | 24~36 В |
| Значення КВ | 200~300 |
| Швидкість розвантаження | 7000 |
| Номінальна потужність | 450~800 Вт |
| Струм навантаження | 15~23 А |
| Номінальний крутний момент | 0,9 Н*м |
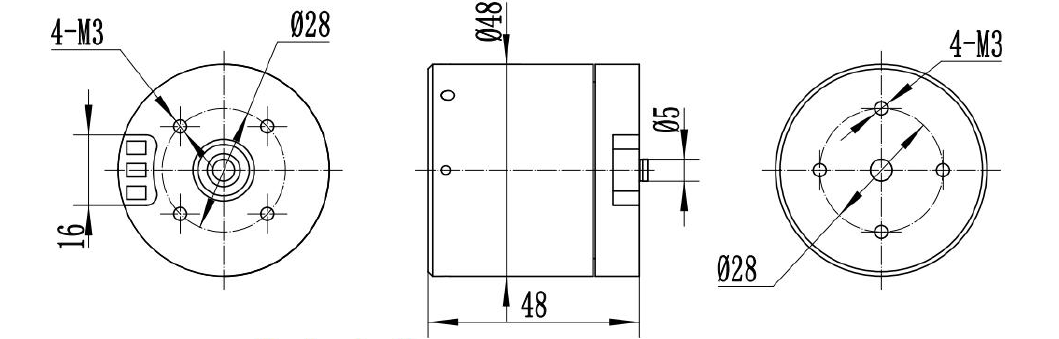
Креслення конструкції: Отвори для гвинтів зверху використовуються для кріплення пропелера
Про підводні двигуни
Оскільки безщітковий двигун використовує електронну комутацію, його робота повинна адаптуватися до напруги джерела живлення постійного струму двигуна, драйвера (ESC) та сигналу керування швидкістю.
Візьмемо для прикладу звичайну модель ESC. Спочатку відключіть джерело живлення, підключіть дроселі двигуна та сигнальну лінію швидкості, встановіть дросельну заслінку на найвище положення (повний робочий цикл), підключіть джерело живлення, ви почуєте два звуки «падіння», дросельна заслінка швидко переміститься в найнижче положення, а потім ви почуєте звук нормального запуску двигуна «падіння ---- падіння». Калібрування ходу дросельної заслінки завершено, ви можете запустити двигун у звичайному режимі. (Режим роботи ESC може відрізнятися залежно від виробника, будь ласка, зверніться до інструкції відповідної моделі ESC або зверніться до виробника ESC для отримання детальної інформації).
Клієнти можуть використовувати звичайний ESC (електричний регулятор швидкості) дрона для керування цим двигуном.
Ми виробляємо лише двигуни та не надаємо послуги з ESC.
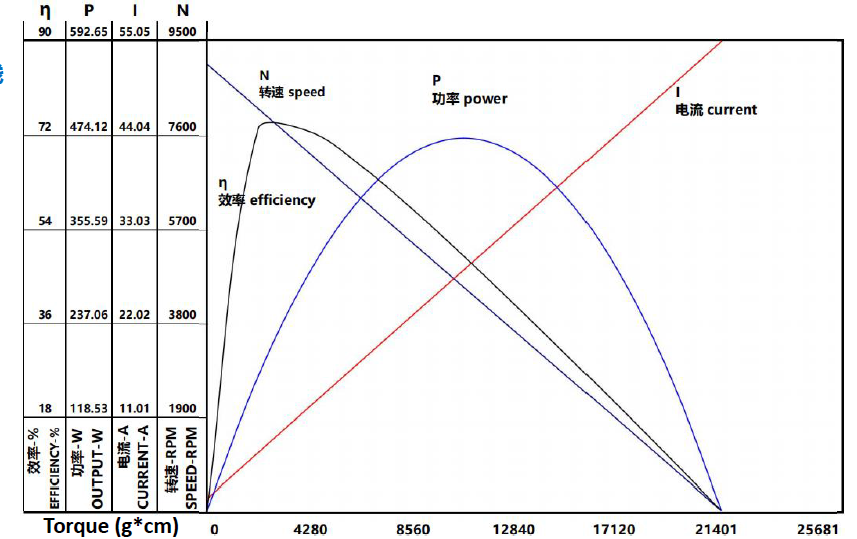
Крива продуктивності двигуна SW2216 (16 В, 550 кВ)
Переваги підводного мотора
1. Водонепроникний та вологостійкий, щоб уникнути короткого замикання електричних компонентів всередині камери.
2. Ефективне блокування пилу та частинок для запобігання зносу підшипників.
3. Тримайте порожнину сухою, щоб уникнути корозії та окислення двигуна та двигуна, що призведе до поганого контакту або витоку.
Застосування
●Прецизійний електронний прилад
●Обладнання для автоматизації
●Підводне спорядження
●Модель літака Дрон
●Розумний робот
Вихідна вісь
1. Спосіб підключення
Перш за все, двигун, блок живлення та регулятор рівня електромеханічної стійкості (ESC) слід вибирати точно відповідно до навантаження та умов використання. Занадто висока напруга живлення може призвести до пошкодження двигуна та ESC, а потужність розряду блоку живлення недостатня для досягнення номінальної потужності двигуна та негативного впливу на його роботу. Вибір ESC також повинен відповідати номінальній напрузі двигуна. Гвинти кріплення двигуна не повинні бути занадто довгими, щоб не пошкодити обмотку двигуна. Перед підключенням, з міркувань безпеки, зніміть навантаження з двигуна, спочатку підключіть три дроти ESC та двигуна (три дроти можна поміняти місцями, щоб змінити напрямок обертання двигуна), а потім підключіть сигнальну лінію ESC, зверніть увагу на порядок підключення сигнальних ліній, не підключайте зворотну полярність. Нарешті, підключіть джерело живлення постійного струму, позитивну та негативну полярність не можна змінювати місцями, більшість ESC на ринку мають захист від зворотного обертання, а ESC без захисту від зворотного обертання в блоці живлення з позитивною та негативною полярністю створюють ризик опіків.
2. Калібрування ходу дросельної заслінки.
Під час першого використання ESC, зміни джерела ШІМ-сигналу або тривалого використання сигналу дросельної заслінки поза калібруванням, необхідно відкалібрувати хід дросельної заслінки.
Інформація про термін виконання та упаковку
Термін виконання зразків:
Стандартні двигуни в наявності: протягом 3 днів
Стандартні двигуни відсутні на складі: протягом 15 днів
Індивідуальні продукти: близько 25~30 днів (залежно від складності налаштування)
Термін виготовлення нової форми: зазвичай близько 45 днів
Термін виконання для масового виробництва: залежно від кількості замовлення
Упаковка
Зразки упаковані в пінопластову губку з паперовою коробкою та відправлені експрес-доставкою.
Масове виробництво, двигуни упаковані в гофровані коробки з прозорою плівкою зовні. (доставка літаком)
Якщо доставка здійснюється морем, продукція буде упакована на піддони

Спосіб та час доставки упаковки
| DHL | 3-5 робочих днів |
| ДБЖ | 5-7 робочих днів |
| ТНТ | 5-7 робочих днів |
| FedEx | 7-9 робочих днів |
| Швидка медична допомога | 12-15 робочих днів |
| Пошта Китаю | Залежить від країни доставки |
| Море | Залежить від країни доставки |

спосіб оплати
| спосіб оплати | Мастер-карта | Віза | Електронна перевірка | ПЛАТІТЬ ПІЗНІШЕ | Т/Т | PayPal |
| Термін виконання зразка замовлення | близько 15 днів | |||||
| Термін виконання оптових замовлень | 25-30 днів | |||||
| гарантія якості продукції | 12 місяців | |||||
| Упаковка | Однокартонна упаковка, 500 штук в коробці. | |||||
Надішліть нам своє повідомлення:
Категорії продуктів
-

низький рівень шуму високоякісний 3,3 В 6 мм мікрокроковий м...
-

Гвинтовий вал M3 2-фазний 10-мм міні-ступінчастий ступінчастий...
-

Щітковий двигун постійного струму N20 з коробкою передач 1024, вихід ...
-

Високоточний 42-мм кроковий двигун NEMA 17 гібрид...
-

Малошумний ступінчастий двигун з постійними магнітами діаметром 50 мм...
-

Гібридний кроковий двигун NEMA 23 з високим крутним моментом 57 мм...